





| Micrófono | ||
|---|---|---|
 Diferentes tipos de micrófonos | ||
| Símbolo electrónico | ||
 | ||


Un micrófono[a] (vocablo acuñado en el siglo XVIII[2] a partir del prefijo micro-, «pequeño» y el griego antiguo ϕωνήi - foné, «voz») es un dispositivo de entrada que se usa para transformar las ondas sonoras en energía eléctrica y viceversa en procesos de grabación y reproducción de sonido; consiste esencialmente en un diafragma atraído por un electroimán, que, al vibrar, modifica la corriente transmitida por las diferentes presiones a un circuito. Un micrófono funciona como un transductor o sensor electroacústico y convierte el sonido (ondas sonoras) en una señal eléctrica para aumentar su intensidad, transmitirla y registrarla. Los micrófonos tienen múltiples aplicaciones en diferentes campos como en telefonía,[3] ciencia, salud,[4] transmisión de sonido en conciertos y eventos públicos, trasmisión de sonido en medios masivos de comunicación como producciones audiovisuales (cine y televisión), radio, producción en vivo y grabado de audio profesional, desarrollo de ingeniería de sonido, reconocimiento de voz y VoIP.
Actualmente, la mayoría de los micrófonos utilizan inducción electromagnética (micrófonos dinámicos), cambio de capacitancia (micrófonos de condensador) o piezoelectricidad (micrófonos piezoeléctricos) para producir una señal eléctrica a partir de las variaciones de la presión de aire. Los micrófonos usualmente requieren estar conectados a un preamplificador antes de que su señal pueda ser grabada o procesada y reproducida en altavoces o cualquier dispositivo de amplificación sonora.
Historia
Con el tiempo, la humanidad entendió la necesidad de desarrollar herramientas de comunicación más eficientes y de mayor alcance. Así, nació el deseo de aumentar el volumen de las palabras que buscaban ser transmitidas. El dispositivo de mayor antigüedad para lograr esto data de 600 a. C.; era una máscara con aperturas bucales que tenía un diseño acústico especial que incrementaba el volumen de la voz en los anfiteatros.[5] En 1665, el físico inglés Robert Hooke fue el primero en experimentar con un elemento como el aire mediante la invención del teléfono de lata que consistía en un alambre unido a una taza en cada una de sus extremos.[6]
En 1827, Charles Wheatstone utiliza por primera vez el vocablo «micrófono» para describir un dispositivo acústico diseñado para amplificar sonidos débiles. Entre 1870 y 1880 comenzó la historia del micrófono y las grabaciones de audio. El primer micrófono formaba parte del fonógrafo, que en esa época era el dispositivo más común para reproducir sonido grabado, y fue conocido como el primer micrófono dinámico.
El inventor alemán Johann Philipp Reis diseñó un transmisor de sonido rudimentario, que utilizaba una tira metálica unida a una membrana vibrante y producía una corriente intermitente. En 1876 Alexander Graham Bell inventó el teléfono y por primera vez incluyó un micrófono funcional que usaba un electroimán. Este dispositivo era conocido como 'transmisor líquido', con el diafragma conectado a una varilla conductora en una solución de ácido.[7] Estos sistemas, sin embargo, ofrecieron una captación de sonido de muy baja calidad, lo que incitó a los inventores a seguir vías alternativas de diseño.
Micrófono de carbón

El primer dispositivo que permitió una comunicación de calidad fue el micrófono de carbón (entonces llamado transmisor), desarrollado independientemente por David Edward Hughes en Inglaterra y Emile Berliner y Thomas Edison en Estados Unidos. Aunque Edison obtuvo la primera patente (después de una larga disputa legal) a mediados de 1877, Hughes logró demostrar que su dispositivo había sido desarrollado durante años, en presencia de muchos testigos. De hecho, la mayoría de los historiadores lo acreditan con su invención.[8][9][10][11]
El dispositivo de Hughes estaba formado por gránulos de carbón empaquetados sin compactar en un recipiente donde solo podía entrar el aire. Las ondas acústicas ejercían presión sobre las partículas de carbón, que reaccionaban y actuaban como un diafragma ejerciendo una resistencia variable al paso de la corriente eléctrica debido a su contenido en carbono, lo que permitía una reproducción relativamente precisa de la señal de sonido.[12] Hizo una demostración de su aparato a la Real Sociedad de Londres magnificando el sonido de insectos a través de una caja de resonancia. La principal desventaja del dispositivo era que con el tiempo perdía sensibilidad. Contrariamente a lo que hizo el inventor estadounidense Thomas Alva Edison, quien solicitó una patente el 27 de abril de 1877 para su desarrollo,[13] Hughes decidió no registrar la patente donando su invención como un regalo para el mundo.[14]
El micrófono de carbón fue el prototipo que dio origen, de forma directa, a los micrófonos que existen en la actualidad y fue fundamental en el desarrollo de la telefonía, la radiodifusión y la industria del entretenimiento.[15]
Por su parte, Edison perfeccionó el micrófono de carbono en 1886, simplificándolo, consiguiendo una fabricación de bajo costo, y haciéndolo muy eficiente y duradero. Se convirtió en la base para los transmisores telefónicos usados en millones de teléfonos en todo el mundo.[10][14] Este micrófono fue empleado en la primera emisión de radio de la historia, una actuación en el Metropolitan Opera House en 1910.[16]
El siguiente paso importante en el diseño del transmisor estuvo en manos del inventor inglés Henry Hunnings. Utilizó gránulos de coque entre el diafragma y una placa metálica como soporte. Este diseño se originó en 1878 y fue patentado en 1879. Este transmisor era muy eficiente y podría competir con cualquiera de sus actuales competidores. Su único inconveniente era que tenía una tendencia a perder sensibilidad de captación.[17]
Otros aportes
En 1916, los Laboratorios Bell desarrollaron el primer micrófono de condensador.[18]
Con el crecimiento de la industria musical y la radio en los años 1920 se estimuló el desarrollo de los micrófonos de carbón de una calidad mayor. En 1920 se inició la era de los anuncios comerciales en los medios masivos de comunicación. La mayoría de profesionales en comunicación y los artistas de alto perfil como cantantes y estrellas comenzaron a usar los micrófonos en sus respectivos campos.

En 1923 se construyó el primer micrófono de bobina móvil con un uso práctico. Era denominado el magnetófono de Marconi-Sykes. Desarrollado por el Capitán Henry Joseph Round, fue utilizado en los estudios de la BBC de Londres.[19] Esta versión de micrófono fue mejorada en 1930 por Alan Blumlein y Herbert Holman, quienes desarrollaron el HB1A, el mejor micrófono en su momento.[20] En el mismo año, se lanzó al mercado el micrófono de cinta, otro tipo de micrófono electromagnético, que se cree fue desarrollado por Harry F. Olson mediante el uso de ingeniería inversa en un altavoz antiguo.[21]
En 1931 la Western Electric presentó el primer micrófono dinámico, el modelo 600, serie 618.
A través de los años, estos micrófonos fueron desarrollados por varias empresas, las mayores aportaciones a esta tecnología los hizo la compañía RCA, que introdujo grandes avances en el control de patrón polar, para dar direccionalidad a la captación del micrófono. Debido al auge del cine y la televisión, se incrementó la demanda de micrófonos de alta fidelidad y una mayor direccionalidad. El primer micrófono que se desarrolló para la industria del cine fue el PB17. Era un cilindro de aluminio de 17 pulgadas de largo y 6 pulgadas de diámetro, su estructura estaba magnetizada y utilizaba un electroimán que requería una corriente de seis voltios y un amperio.
Ya en 1947 se produce un evento importante para la historia del micrófono: se fundó la AKG en Viena, una empresa austríaca que empezó a fabricar accesorios profesionales de audio, en especial micrófonos y auriculares. Y en 1948 Neumann lanzó el micrófono de válvulas U47, el primer micrófono de condensador con patrón polar conmutable entre cardioide y omnidireccional. Acabó convirtiéndose en todo un clásico para grabar voces desde que se supo que Frank Sinatra se negaba a cantar sin su U47.
En 1962 Hideo Matsushita estableció la empresa Audio-Technica Corporation en Tokio. La compañía lanzó los modelos AT-1 y AT-3MM de cápsulas estereofónicas y empezó a suministrar cápsulas a fabricantes de audio. Posteriormente, en 1978, Audio-Technica lanzó los auriculares de condensador ATH-8 y ATH-7. Estos auriculares ganaron diversos premios. Este año también se produjo el desarrollo y lanzamiento de la Serie 800 de micrófonos, y la creación de Audio-Technica Ltd. en Leeds, Inglaterra
El fabricante Electro-Voice respondió a las demandas de la industria del cine desarrollando el "Shotgun microphone" o "Micrófono Boom" en 1963, que ofrecía una captación de audio con mayor enfoque gracias que era unidireccional.
Durante la segunda mitad del siglo XX el desarrollo en tecnología de micrófonos avanzó rápidamente, cuando los Hermanos Shure lanzaron al mercado los modelos SM58 y SM57. La compañía Milab fue pionera en la era digital al lanzar en 1999 el DM-1001.[22] Las investigaciones más recientes incluyen el uso de fibras ópticas, láser e interferómetros.
Componentes y estructura
Diafragma
Es la parte más delicada de un micrófono. En algunos lugares también recibe el nombre de «pastilla», aunque generalmente este término se refiere al dispositivo que capta las vibraciones en los instrumentos como, por ejemplo, en una guitarra eléctrica. El diafragma es una membrana que recibe las vibraciones sonoras y está unido al sistema que transforma estas ondas en electricidad.
Dispositivo transductor (elemento o cápsula)
El dispositivo transductor sensible de un micrófono se llama «elemento» o «cápsula». Esta cápsula microfónica puede estar construida de diferentes maneras y, dependiendo del tipo de transductor, se pueden clasificar los micrófonos como dinámicos, de condensador, de carbón o piezoeléctricos.
Rejilla
Protege el diafragma. Evita tanto los golpes de sonido (las “p” y las “b”) como los daños físicos causados por alguna caída.
Carcasa
Es el recipiente donde se colocan los componentes del micrófono. En los de mano, que son los más comunes, esta carcasa es de metales poco pesados, ligeros de portar pero resistentes a la hora de proteger el dispositivo transductor.
Tipos de micrófono
Los micrófonos son clasificados según su tipo de transductor, ya sea de condensador o dinámico, y por sus características direccionales. A veces, otras características tales como el tamaño de diafragma, el uso previsto o la orientación de la entrada de sonido principal se utilizan para clasificar el micrófono.
Micrófono de condensador


El «micrófono de condensador» fue inventado en los Laboratorios Bell en 1916 por Edward Christopher Wente.[23] También llamado «micrófono electroestático» o «micrófono de capacitancia» , en este tipo de micrófonos el diafragma actúa como una placa que «condensa» las vibraciones de las ondas sonoras, que producen cambios debido a la variación de la distancia que hay entre el diafragma y la placa. Hay dos tipos, dependiendo del método de extracción de la señal de audio desde el transductor: micrófonos de polarización de CC, y micrófonos de condensador de frecuencia de radio (RF) o de onda corta.
En un micrófono de polarización de CC, las placas son sesgadas con una carga fija (Q). La tensión que existe entre las placas del condensador cambia con las vibraciones en el aire (de acuerdo con la ecuación de la capacitancia , donde Q = carga en culombios, C = capacitancia en faradios y V = diferencia de potencial en voltios). La capacitancia de las placas es inversamente proporcional a la distancia entre ellas para un condensador de placas paralelas. El montaje de placas fijas y móviles se llama un «elemento» o «cápsula».

En el condensador se mantiene una carga casi constante. Con los cambios de capacitancia, la carga a través del condensador cambia muy ligeramente, pero a frecuencias audibles es sensiblemente constante. La capacitancia de la cápsula (alrededor de 5 a 100 pF) y el valor de la resistencia de polarización (100 mO a decenas de GΩ) forman un filtro que es de paso alto para la señal de audio, y de paso bajo para la tensión de polarización. Téngase en cuenta que la constante de tiempo de un circuito RC es igual al producto de la resistencia y la capacitancia.
Dentro del marco de tiempo de la variación de la capacidad (tanto como 50 ms a 20 Hz de una señal de audio), la carga es prácticamente constante y el voltaje a través del condensador cambia instantáneamente para reflejar el cambio en la capacitancia. El voltaje a través del condensador varía por encima y por debajo de la tensión de polarización. La diferencia de voltaje entre el sesgo y el condensador se detecta a través de la resistencia en serie. El voltaje a través del resistor es amplificado para mejorar su rendimiento o para su grabación. En la mayoría de los casos, la electrónica del propio micrófono contribuye a la ganancia de tensión, de forma que el diferencial de tensión es bastante significativo, hasta de varios voltios para niveles de sonido altos. Como se trata de un circuito de muy alta impedancia, la ganancia de corriente solo es la necesaria para modificar la tensión constante de referencia.
Micrófono de condensador RF

Utilizan una tensión de RF comparativamente baja, generada por un oscilador de bajo ruido. La señal del oscilador o bien puede ser modulada en amplitud por los cambios de capacitancia producidas por las ondas de sonido al mover el diafragma o cápsula, o la cápsula puede ser parte de un circuito resonante que modula la frecuencia de la señal del oscilador. La demodulación produce una señal de frecuencia de audio de bajo ruido, con una impedancia de fuente muy baja. La ausencia de una tensión de polarización alta permite el uso de un diafragma con la tensión más baja, que puede ser utilizado para lograr la respuesta de frecuencia más amplia debido a una mayor sensibilidad. Los resultados del proceso de polarización de RF en una cápsula de impedancia eléctrica más baja, permite que los micrófonos de condensador de RF pueden funcionar en condiciones climáticas húmedas, que podrían crear problemas en los micrófonos que utilizan una corriente de referencia-DC con superficies aislantes contaminadas. La serie de micrófonos Sennheiser "MKH" utiliza la técnica de empuje de RF.
Los micrófonos de condensador abarcan toda la gama de transmisores de telefonía, así como para otros usos, desde los micrófonos de karaoke de bajo costo hasta los micrófonos de grabación de alta fidelidad. Por lo general, producen una señal de audio de alta calidad y ahora son la elección habitual de laboratorios y estudios de grabación. La idoneidad inherente de esta tecnología se debe a la masa muy pequeña que debe ser movida por la onda sonora incidente, a diferencia de otros tipos de micrófonos que requieren que la onda de sonido realice un mayor trabajo mecánico. Requieren una fuente de alimentación, bien a través de las entradas de micrófono en el equipo como alimentación auxiliar o de una pequeña batería. Esta corriente es necesaria para el establecimiento de la tensión de placa del condensador de potencia, y también es necesaria para alimentar la electrónica de micrófono (conversión de impedancia en el caso de micrófonos electret y polarizadas-DC, demodulación o detección en el caso de micrófonos RF/HF). Los micrófonos de condensador también están disponibles con dos diafragmas que pueden ser conectados eléctricamente para proporcionar una gama de patrones polares (véase más adelante), como cardioide, omnidireccional, y en forma de ocho. También es posible variar el patrón continuamente con algunos micrófonos (por ejemplo el Røde NT2000 o el CAD M179).
Un micrófono de válvula es un micrófono de condensador que utiliza un tubo de vacío amplificador (válvula). Siguen siendo populares entre los entusiastas del sonido procesado por válvulas de vacío.
Micrófono de condensador Electret
Un micrófono electret es un tipo de micrófono condensador inventado por Gerhard Sessler y Jim West en los Laboratorios Bell en 1962. La aplicación de una carga externa descrita anteriormente en los micrófonos de condensador se sustituye por una carga permanente en un material electret, un material ferroeléctrico que ha sido permanentemente cargado eléctricamente o polarizado. El nombre proviene de electrostatic y magnet; una carga estática se mantiene asociada en un electret por la alineación de las cargas estáticas en el material, de la misma forma en que un imán el magnetismo se hace permanente mediante la alineación de los dominios magnéticos en una pieza de hierro.
Debido a su buen funcionamiento y facilidad de fabricación, por lo tanto, de bajo coste, la gran mayoría de los micrófonos hechos hoy en día son micrófonos electret; un fabricante de semiconductores estima que la producción anual es de más de mil millones de unidades. Casi todos los teléfonos celulares, ordenadores, PDA y auriculares-micrófonos son del tipo electret. Se utilizan en muchas aplicaciones, desde la grabación de alta calidad y de solapa, hasta en los micrófonos incorporados en pequeños dispositivos de grabación de sonido y teléfonos. Aunque los micrófonos electret fueron considerados inicialmente de baja calidad, los mejores modelos de estos micrófonos pueden ahora competir con los modelos de condensadores tradicionales en todos los aspectos y pueden incluso ofrecer una mayor estabilidad a largo plazo y la respuesta ultra-plana necesaria para un micrófono de medición. A pesar de no requerir tensión de polarización, como otros micrófonos de condensador, a menudo contienen un sistema integrado preamplificador que requiere de energía (a menudo llamado incorrectamente potencia o sesgo de polarización). Este preamplificador es frecuentemente una alimentación fantasma para el refuerzo de sonido y aplicaciones de estudio. Algunos micrófonos monofónicos diseñados para computadoras personales (PC), a veces llamados micrófonos multimedia, utilizan un conector de 3,5 mm, como se usa por lo general, sin toma de potencia, para los equipos estereofónicos; el conector, en lugar de llevar la señal para un segundo canal, lleva la potencia eléctrica a través de una resistencia de (normalmente) un suministro de 5 V en el ordenador. Los micrófonos estereofónicos utilizan el mismo conector; no hay forma obvia de determinar qué sistema es utilizado por equipos y micrófonos.
Solo los mejores micrófonos electret pueden rivalizar en términos de nivel de ruido y calidad con otros tipos de micrófonos de calidad. Por el contrario, se prestan a la producción en masa de bajo costo con unas prestaciones aceptables, lo que ha propiciado su uso masivo en todo tipo de dispositivos.
Micrófono dinámico

Los micrófonos dinámicos (también conocidos como micrófonos magneto-dinámicos) trabajan a través de la inducción electromagnética. Son robustos, relativamente baratos y resistentes a la humedad. Esto, junto con su potencial de alta ganancia antes de la retroalimentación, los hace ideales para su uso en el escenario.
Los micrófonos de bobina móvil utilizan el mismo principio dinámico que es utilizado en un altavoz, pero invertido. Una pequeña bobina de inducción móvil, situada en el campo magnético de un imán permanente, está unida a la membrana. Cuando el sonido entra a través de la rejilla del micrófono, la onda de sonido mueve el diafragma, desplazando la bobina que se mueve en el campo magnético, que a su vez produce una variación de corriente en la bobina a través de la inducción electromagnética. Una sola membrana dinámica no responde linealmente a todas las frecuencias de audio. Algunos micrófonos por esta razón utilizan múltiples membranas para las diferentes partes del espectro de audio y luego se combinan las señales resultantes. Combinar correctamente las múltiples señales es difícil, y los diseños capaces de hacerlo son raros y tienden a ser caros. Por otra parte, existen varios diseños que se dirigen más específicamente a partes aisladas del espectro de audio. El AKG D 112, por ejemplo, está diseñado para responder a los sonidos graves en lugar de los agudos. En la ingeniería de audio, se utilizan a menudo varios tipos de micrófonos al mismo tiempo para obtener el mejor resultado.
Micrófono de cinta

Los micrófonos de cinta utilizan una cinta delgada de metal (por lo general corrugada), suspendida en un campo magnético. La cinta está conectada eléctricamente a la salida del micrófono, y su vibración dentro del campo magnético genera la señal eléctrica. Los micrófonos de cinta son similares a los micrófonos de bobina (ambos producen sonido por medio de la inducción magnética). Detectan el sonido en un patrón bidireccional (también llamado en forma de ocho, como en el diagrama de abajo) porque la cinta está abierta en ambos lados, y porque tiene poca masa, por lo que responde a la velocidad del aire en lugar de a la presión del sonido. Aunque la parte delantera simétrica y la pastilla trasera pueden ser una molestia en la grabación estéreo normal, el rechazo del lado de alta se puede utilizar ventajosamente mediante la colocación de un micrófono de cinta horizontal, por ejemplo, por encima de los platillos de una batería, de modo que el lóbulo trasero recoge únicamente el sonido de los platillos. Las figuras cruzadas en forma de 8 o pares Blumlein, están ganando popularidad en la grabación estereofónica, y la disposición de la respuesta de un micrófono de cinta con forma de ocho es ideal para esa aplicación.
Otros patrones direccionales se pueden producir confinando un lado de la cinta en una trampa acústica o deflector, lo que permite que el sonido llegue de un solo lado. El clásico micrófono RCA Tipo 77-DX tiene varias posiciones externamente ajustables del deflector interno, lo que permite la selección de varios patrones de respuesta que van desde la "forma de ocho" a "unidireccional". Estos micrófonos de cinta mayores, algunos de los cuales siguen ofreciendo una reproducción de sonido de alta calidad, fueron en su momento muy valorados por esta razón, pero solo podían obtener una buena respuesta de baja frecuencia cuando la cinta permanecía correctamente suspendida, lo que les hizo relativamente frágiles. Los materiales utilizados en la cinta se han modernizado, incluyendo nuevos nanomateriales, lo que ha permitido hacer estos micrófonos más fiables, e incluso mejorar su rango dinámico efectivo en las frecuencias bajas. Las pantallas anti-viento de protección pueden reducir el peligro de dañar una cinta antigua, y también reducir las explosiones sonoras en la grabación. Las pantallas de viento correctamente diseñadas producen una atenuación de agudos insignificante. Al igual que otros tipos de micrófono dinámico, los micrófonos de cinta no requieren alimentación auxiliar; de hecho, este voltaje puede dañar algunos micrófonos de cinta antiguos. Algunos nuevos diseños modernos de micrófonos de cinta incorporan un preamplificador y, por lo tanto, requieren alimentación auxiliar. Los circuitos de los micrófonos de cinta pasiva modernos, es decir, los que no tienen el preamplificador mencionado, están diseñados específicamente para resistir el daño a la cinta y al transformador de alimentación auxiliar. También hay nuevos materiales de cinta disponibles que son inmunes al viento, a las explosiones sonoras y a la alimentación auxiliar.
Micrófono de carbono

Un micrófono de carbono, también conocido como micrófono de botón, utiliza una cápsula o botón que contiene gránulos de carbón prensado entre dos placas de metal como los micrófonos de Berliner y Edison. Aplicando un voltaje a través de las placas de metal, provoca que una pequeña corriente eléctrica fluya hacia el carbono. Una de las placas, el diafragma, vibra en sintonía con las ondas de sonido incidente, aplicando una presión variable a los gránulos de carbón. El cambio de presión deforma los gránulos, causando que el área de contacto entre cada par de gránulos adyacentes cambie, y esto provoca que la resistencia eléctrica de la masa de gránulos cambie. Los cambios en la resistencia produce un cambio correspondiente en el flujo de corriente a través del micrófono, produciendo la señal eléctrica. Hubo una época en que los micrófonos de carbono fueron usados comúnmente en telefonía; tienen una calidad de reproducción de sonido extremadamente baja y un rango de respuesta de frecuencias muy limitado, pero son dispositivos muy robustos. El micrófono de Boudet, que utiliza bolas de carbono relativamente grandes, fue similar a los micrófonos de botón de carbono granular.
A diferencia de otros tipos de micrófonos, el micrófono de carbono también puede ser utilizado como un tipo de amplificador, usando una pequeña cantidad de energía eléctrica. En su inicio, los micrófonos de carbono se utilizaban como repetidores telefónicos, haciendo posible las llamadas de larga distancia en la era anterior a los tubos de vacío. Estos repetidores trabajan mecánicamente, acoplando un receptor telefónico magnético al micrófono de carbono: la débil señal del receptor era transferida al micrófono, donde era modulada en una fuerte corriente eléctrica, produciendo a su vez una fuerte señal eléctrica para enviar por la línea. Una consecuencia de este efecto amplificador era la oscilación producida por retroalimentación, resultando en un chillido audible en los primitivos teléfonos de pared cuando el auricular se colocaba cerca del micrófono de carbono.
Micrófono piezoeléctrico
.jpg)
Un micrófono de cristal o piezo micrófono[24] utiliza el fenómeno de la piezoelectricidad —la capacidad de algunos materiales para producir un voltaje cuando se someten a presión, para convertir las vibraciones en una señal eléctrica—. Un ejemplo de esto es el tartrato de sodio y potasio, que es un cristal piezoeléctrico que funciona como un transductor (en forma de componente extraplano), indistintamente como un micrófono o como un altavoz. Los micrófonos de cristal eran suministrados comúnmente con los equipos de tubos de vacío (válvulas), tales como grabadoras domésticas. Su alta impedancia de salida coincide también con la alta impedancia (típicamente de aproximadamente 10 megaohmios) de la etapa de entrada de los tubos de vacío. Eran difíciles de igualar al comienzo de los equipos transistorizados, pero fueron sustituidos rápidamente por los micrófonos dinámicos durante un tiempo, y más tarde por los pequeños dispositivos de condensador electret. La alta impedancia de los micrófonos de cristal los hizo muy susceptibles a los ruidos parásitos, tanto desde el propio micrófono como desde el cable de conexión.
Los transductores piezoeléctricos se utilizan a menudo como micrófonos de contacto para amplificar el sonido de los instrumentos musicales acústicos, para detectar golpes de tambor, para disparar muestras electrónicas, y para grabar sonido en entornos difíciles, como bajo el agua a alta presión. Las pastillas montadas en guitarras acústicas son generalmente dispositivos piezoeléctricos en contacto con las cuerdas. Este tipo de micrófono es diferente de las pastillas de bobina magnética comúnmente visibles en las típicas guitarras eléctricas, que utilizan la inducción magnética, en lugar del acoplamiento mecánico, para recoger las vibraciones.
Micrófono de fibra óptica

Un micrófono de fibra óptica convierte las ondas acústicas en señales eléctricas mediante la detección de cambios en la intensidad de la luz, en lugar de detectar cambios en la capacitancia o en campos magnéticos, como con los micrófonos convencionales.[25][26]
Durante su funcionamiento, la luz de una fuente láser viaja a través de una fibra óptica para iluminar la superficie de un diafragma reflectante. Las vibraciones del sonido del diafragma modulan la intensidad de la luz que refleja el diafragma en una dirección específica. La luz modulada se transmite entonces a través de una segunda fibra óptica a un fotodetector, que transforma la luz de intensidad modulada en audio analógico o digital para su transmisión o grabación. Los micrófonos de fibra óptica poseen un alto rango dinámico y de frecuencia, similar al de los mejores micrófonos convencionales de alta fidelidad.
Además, no son influidos por campos eléctricos, magnéticos, electrostáticos o radiactivos (esto se llama inmunidad EMI/RFI). El diseño del micrófono de fibra óptica por lo tanto, es ideal para su uso en áreas donde los micrófonos convencionales son ineficaces o peligrosos, como el interior de turbinas industriales o en el entorno de equipos de resonancia magnética (MRI).
Son robustos, resistentes a los cambios ambientales de temperatura y humedad, y se pueden producir para cualquier direccionalidad o adaptación de impedancia. La distancia entre la fuente de luz del micrófono y su fotodetector puede ser de hasta varios kilómetros sin necesidad de preamplificador o de cualquier otro dispositivo eléctrico, por lo que los micrófonos de fibra óptica son adecuados para la monitorización acústica industrial y la vigilancia.
Se utilizan en áreas de aplicación muy específicas, como la detección de infrasonidos y en la cancelación de ruido. Han demostrado ser especialmente útiles en aplicaciones médicas, permitiendo que puedan comunicarse con normalidad los radiólogos, el personal y los pacientes situados dentro del potente campo magnético y del ambiente ruidoso en las salas con equipos de resonancia magnética, así como en las salas de control a distancia.[27] Otros usos incluyen el monitorizado de equipos industriales y detección, calibración y medición de audio, grabación de alta fidelidad y cumplimiento de los niveles sonoros limitados por la ley.[28]
Micrófono láser
Los micrófonos láser aparecen a menudo en las películas como gadgets de espionaje, ya que pueden ser utilizados para recoger el sonido a distancia desde el equipo de microfónico. Un rayo láser se dirige a la superficie de una ventana u otra superficie plana que se ve afectada por el sonido. Las vibraciones de esta superficie cambian el ángulo en el que el haz se refleja, permitiendo detectar el movimiento del punto del haz láser, que tras regresar al equipo se convierte en una señal de audio.
En una aplicación más robusta y cara, la luz devuelta se divide y alimenta un interferómetro, que detecta el movimiento de la superficie por los cambios en la longitud del camino óptico del haz reflejado. Se trata de un desarrollo experimental; puesto que requiere un láser extremadamente estable y ópticas muy precisas.
Un nuevo tipo de micrófono láser es un dispositivo que utiliza un haz de láser y humo o vapor para detectar las vibraciones sonoras al aire libre. El 25 de agosto de 2009, la patente de Estados Unidos 7.580.533 expedida para un micrófono de detección de partículas de flujo basado en el acoplamiento de láser y fotocélula, con una corriente en movimiento del humo o vapor en la trayectoria del rayo láser. Las ondas de presión del sonido causan perturbaciones en el humo, que a su vez causan variaciones en la cantidad de luz láser que llega al fotodetector. Un prototipo del dispositivo se demostró en la 127a convención de la Audio Engineering Society en Nueva York del 9 al 12 de octubre de 2009.
Micrófono líquido
Los primeros micrófonos no permitieron reproducir el habla de forma inteligible, hasta que Alexander Graham Bell hizo mejoras incluyendo una resistencia variable entre micrófono y transmisor. El transmisor líquido de Bell consistía en un recipiente de metal lleno de agua con una pequeña cantidad de ácido sulfúrico añadido. Una onda de sonido provocaba que el diafragma se moviera, forzando que una aguja se moviera hacia arriba y hacia abajo en el agua. La resistencia eléctrica entre el alambre y el recipiente era entonces inversamente proporcional al tamaño del menisco de agua alrededor de la aguja sumergida. Elisha Gray presentó el anuncio de una versión con una varilla de bronce en lugar de la aguja. Se presentaron otras variantes y mejoras menores al micrófono líquido (ideadas por Majoranna, Chambers, Vanni, Sykes, y Elisha Gray), y Reginald Fessenden patentó su propia versión en 1903. Estos fueron los primeros micrófonos, pero no eran prácticos para su aplicación comercial. La famosa primera conversación telefónica entre Bell y Watson se llevó a cabo utilizando un micrófono líquido.
Micrófono microelectromecánico (MEMS)
Los micrófonos del tipo MEMS ("Microelectromechanical systems" en inglés), también son denominados chips microfónicos o micrófonos de silicio. Un diafragma sensible a la presión se graba directamente en una oblea de silicio mediante técnicas de procesamiento de MEMS, y por lo general se acompaña con un preamplificador integrado. La mayoría de los micrófonos MEMS son variantes del diseño del micrófono de condensador. Los MEMS digitales se han construido integrados en circuitos analógico-a-digital (ADC) en el mismo chip CMOS, haciendo del chip un micrófono digital completo, más fácilmente incorporable a productos digitales modernos. Los principales fabricantes que producen micrófonos MEMS de silicio son Wolfson Microelectrónica (WM7xxx) ahora Cirrus Logic,[29] Analog Devices,[30] Akustica (AKU200x), Infineon (producto SMM310), Knowles Electronics, MemsTech (MSMx), NXP Semiconductors (división comprada por Knowles[31]), Sonion MEMS, Vesper, Tecnologías acústicas AAC[32] y Omron.[33]
Más recientemente, ha aumentado el interés y la investigación en la fabricación de MEMS piezoeléctricos, que suponen un cambio de arquitectura y materiales significativo respecto a los diseños de MEMS existentes, basados en la tecnología del condensador.[34]
Altavoces como micrófonos
Un altavoz es un transductor que convierte una señal eléctrica en ondas de sonido. Funcionalmente, es lo opuesto a un micrófono, dado que los altavoces convencionales se construyen de forma muy parecida a un micrófono dinámico (con un diafragma, la bobina y el imán), los altavoces en realidad puede trabajar "a la inversa", como micrófonos. El resultado, sin embargo, es un micrófono con mala calidad, respuesta de frecuencia limitada (sobre todo en el extremo superior), y una pobre sensibilidad. En la práctica, los altavoces se utilizan a veces como micrófonos en aplicaciones donde la alta calidad y la sensibilidad no se necesitan, como interfonos, walkie-talkies o videojuegos de chat de voz periféricos, o cuando los micrófonos convencionales son escasos.
Sin embargo, hay al menos otra aplicación práctica de este principio: el uso de un altavoz de tamaño medio colocado muy próximo, frente al pedal del bombo de una batería, para actuar como un micrófono. El uso de altavoces relativamente grandes para transducir fuentes de sonido de baja frecuencia, sobre todo en la producción de música, se está volviendo bastante común. Un ejemplo de un producto de este tipo de dispositivo es el Yamaha SUBKICK, un altavoz de graves de 6,5 pulgadas (170 mm) montado frente a los instrumentos de percusión. Al poseer una membrana relativamente pesada, no es capaz de transducir altas frecuencias, por lo que la colocación de un altavoz delante de un bombo a menudo es ideal para captar el sonido del bombo. Con menos frecuencia, los micrófonos en sí mismos se pueden utilizar como altavoces, casi siempre para reproducir sonidos agudos. Los micrófonos, sin embargo, no están diseñados para manejar la potencias que se requieren habitualmente utilizadas para activar los altavoces. Un ejemplo de tal aplicación fue "súper tweeter" STC 4001, derivado de un micrófono. Este dispositivo fue utilizado con éxito en una serie de sistemas de altavoces de alta calidad de la década de 1960 hasta mediados de los años 70.
Diseño y direccionalidad de la cápsula
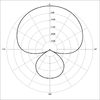
Los elementos internos de un micrófono son la principal fuente de diferencias en la direccionalidad. Un micrófono de presión usa un diafragma entre un volumen interno fijo de aire y el ambiente, y responde uniformemente a la presión desde todas las direcciones, por lo que se dice que es omnidireccional. Un micrófono de gradiente de presión utiliza un diafragma que está al menos parcialmente abierto en ambos lados. La diferencia de presión entre los dos lados produce sus características direccionales. Otros elementos, como la forma externa del micrófono y los dispositivos externos, como los tubos de interferencia, también pueden alterar la respuesta direccional de un micrófono. Un micrófono de gradiente de presión puro es igualmente sensible a los sonidos que llegan desde adelante o atrás, pero insensible a los sonidos que llegan desde un lado porque el sonido que llega al frente y atrás al mismo tiempo no crea gradiente entre los dos. El patrón direccional característico de un micrófono de gradiente de presión puro es como una figura en forma de 8. Otros patrones polares se generan al crear una cápsula que combina estos dos efectos de diferentes maneras. El cardioide, por ejemplo, presenta una parte trasera parcialmente cerrada, por lo que su respuesta es una combinación de características de presión y gradiente de presión.[35]
Patrón polar de un micrófono
(Gráficas de los diferentes tipos de patrones polares):
-

Omnidireccional -

Bidireccional o Figura de 8 -

Subcardiode -

-

Hipercardioide -
Supercardioide -

Shotgun







La direccionalidad de un micrófono o patrón polar indica de qué manera es sensible a los sonidos que llegan en diferentes ángulos alrededor de su eje central. Los patrones polares ilustrados anteriormente representan el lugar geométrico de los puntos que producen la misma salida de nivel de señal en el micrófono si un determinado nivel de presión sonora (SPL) se genera a partir de ese punto. La forma en que el cuerpo físico del micrófono se orienta en relación con los diagramas depende del diseño del micrófono. Para los micrófonos de gran membrana como en el Oktava (foto superior), la dirección hacia arriba en el diagrama polar es generalmente perpendicular al cuerpo del micrófono, comúnmente conocido como "lado de fuego" o "dirección de lado". Para los pequeños micrófonos de diafragma, como el Shure (también en la foto de arriba), por lo general se extiende desde el eje del micrófono comúnmente conocido como "fuego final" o "dirección de la parte superior/fin".
Algunos diseños de micrófonos combinan varios principios en la creación del patrón polar deseado. Esto va desde el blindaje del propio alojamiento (lo que significa difracción/disipación/absorción), hasta combinar electrónicamente membranas duales.
Omnidireccional
La respuesta de un micrófono omnidireccional (o no direccional) se considera generalmente que es una esfera perfecta en tres dimensiones. En el mundo real, este no es el caso. Como con los micrófonos direccionales, el patrón polar de un micrófono "omnidireccional" es una función de la frecuencia. El cuerpo del micrófono no es infinitamente pequeño y, como consecuencia, tiende a interferir en su propio campo con respecto a los sonidos que llegan desde la parte trasera, provocando un ligero aplanamiento de la respuesta polar. Este aplanamiento aumenta a medida que el diámetro del micrófono (asumiendo que es cilíndrico) llega a la longitud de onda de la frecuencia en cuestión. Por lo tanto, el micrófono de diámetro más pequeño da las mejores características omnidireccionales a altas frecuencias.
La longitud de onda del sonido a 10 kHz es poco más de una pulgada (3,4 cm). Los micrófonos de medición más pequeños suelen ser de 1/4" (6 mm) de diámetro, lo que prácticamente elimina la direccionalidad incluso hasta de las frecuencias más altas. Los micrófonos omnidireccionales, a diferencia de los cardioides, no emplean cavidades resonantes, por lo que pueden ser considerados los micrófonos "más puros" en términos de baja coloración; agregan muy poca distorsión al sonido original. Ser sensible a la presión puede requerir una respuesta de baja frecuencia muy plana hasta los 20 Hz o por debajo, por lo que los micrófonos sensibles a la presión también responden mucho menos al ruido del viento y a las oclusivas (velocidad sensible) que los micrófonos direccionales.
Un ejemplo de un micrófono no direccional es el modelo "8-Ball", cuyo diseño es una esfera de color negro.[36]
Unidireccional
Un micrófono unidireccional es sensible a los sonidos de una sola dirección. El diagrama anterior ilustra varios de estos patrones. En cada diagrama, el micrófono está orientado hacia arriba. La intensidad del sonido de una frecuencia particular se mide perimetralmente de 0 a 360°. Los diagramas profesionales muestran estas escalas e incluyen varias gráficas con diferentes frecuencias. Los diagramas anteriores solo proporcionan una visión general de las formas típicas de los patrones habituales, y facilitan sus nombres.
Cardioide

El micrófono unidireccional más común es el micrófono cardioide, llamado así debido a que el patrón de sensibilidad tiene "forma de corazón", es decir, una curva cardioide. La familia de micrófonos cardioides se utilizan comúnmente como micrófonos vocales o del habla, ya que son buenos en el rechazo de los sonidos de otras direcciones. En tres dimensiones, el cardioide tiene la forma de una manzana, centrada alrededor del micrófono que sería el "tallo" de la manzana. La respuesta cardioide reduce la captación trasera y desde los lados, ayudando a evitar la retroalimentación de los monitores. Estos micrófonos son direccionales respecto al gradiente de presión del transductor, por lo que ponerlos muy cerca de la fuente de sonido (a distancias de unos pocos centímetros) se traduce en un refuerzo de los graves. Esto se conoce como el "efecto de proximidad".[37] El SM58 ha sido el micrófono más utilizado para voces en directo durante más de 50 años,[38] lo que demuestra la importancia y la popularidad de los micrófonos cardioides.
Un micrófono cardioide es efectivamente una superposición de un micrófono omnidireccional y de un micrófono en figura en 8. Con esta disposición, las ondas sonoras procedentes de la parte de atrás, la señal negativa del dispositivo con figura en 8, cancela la señal positiva del elemento omnidireccional, mientras que para las ondas de sonido que vienen de la parte delantera, los dos se suman entre sí. Un micrófono hipercardioide es similar, pero con una figura en 8 un poco más grande, lo que produce una zona más estrecha de sensibilidad frontal y un lóbulo menor de sensibilidad trasera. Un micrófono supercardioide es similar a uno hiper-cardioide, excepto en que posee una mayor sensibilidad frontal y una trasera todavía menor. Mientras que cualquier patrón entre el omnidireccional y la figura en 8 es posible mediante el ajuste de su mezcla, las definiciones comunes afirman que un hipercardioide se produce mediante la combinación de ambos en una proporción de 3:1, produciendo sensibilidad nula a 109,5 °, mientras que un supercardioide se genera con una relación 5:3, con sensibilidad nula a 126,9°. El micrófono sub-cardioide no tiene puntos nulos. Se produce con una relación de aproximadamente 7:3, con un nivel de 3-10 dB entre la toma delantera y la posterior.[39][40]
Bidireccional
Los micrófonos en "Figura de 8" o micrófonos bidireccionales, reciben el sonido por igual de las partes delantera y posterior del elemento. La mayoría de los micrófonos de cinta son de este tipo. En principio no responden a la presión sonara en absoluto, excepto para el cambio de presión entre la parte delantera y la parte posterior; desde su llegada, el sonido alcanza la parte delantera y la trasera de igual manera, y no hay diferencia en la presión. Por lo tanto, no responden al sonido de esa dirección. En términos matemáticos, mientras que los micrófonos omnidireccionales son transductores escalares que responden a la presión desde cualquier dirección, los micrófonos bidireccionales son transductores vectoriales que responden al gradiente a lo largo de un eje normal al plano del diafragma. Esto también tiene el efecto de invertir la polaridad de salida para los sonidos que llegan desde el lado posterior.
Shotgun, boom y micrófonos parabólicos



Los micrófonos de cañón son altamente direccionales. Su patrón direccional tiene un lóbulo muy estrecho en la dirección hacia adelante y rechaza el sonido de otras direcciones. Tienen pequeños lóbulos de sensibilidad a la izquierda, a la derecha, y en la parte trasera, pero son mucho menos sensibles en la parte trasera que otros micrófonos direccionales. Esto es consecuencia de la colocación del elemento en el extremo posterior de un tubo con ranuras cortadas a lo largo del lateral; la cancelación de ondas elimina gran parte del sonido fuera del eje. Debido a la estrechez de su área de sensibilidad, los micrófonos de cañón se utilizan comúnmente en las cámaras de televisión y de cine, en los estadios, y para la grabación de campo de la vida silvestre. Los micrófonos parabólicos tienen características similares, pero a menudo tienen una respuesta de graves más pobre.
Limitadores o "PZM"
Varios enfoques han sido desarrollados para la utilización eficaz de un micrófono en espacios acústicos no ideales, que a menudo sufren de reflexiones excesivas de una o más de las superficies (límites) que componen el espacio. Si el micrófono se coloca en, o muy cerca de, uno de estos límites, las reflexiones de superficie no son detectadas por el micrófono. Inicialmente esto se hizo mediante la colocación de un micrófono normal adyacente a la superficie, a veces en un bloque de espuma acústicamente transparente. Los ingenieros de sonido Ed Long y Ron Wickersham desarrollaron el concepto de colocar el diafragma en paralelo y hacia la frontera. Hasta que la patente expire,[41] los términos "Pressure Zone Microphone" y "PZM" siguen siendo marcas activas de Crown International, por lo que es preferible utilizar la locución genérica «micrófono de superficie». Mientras que el micrófono de superficie se diseñó inicialmente utilizando un elemento omnidireccional, también es posible montar un micrófono direccional lo suficientemente cerca de la superficie para obtener algunos de los beneficios de esta técnica, al tiempo que conserva las propiedades direccionales del elemento. La marca registrada de Crown de este enfoque se denomina "Phase Coherent Cardioid" o "PCC", pero hay otros fabricantes que emplean esta técnica también.
Aplicaciones de diseños específicos

Un micrófono de solapa está diseñado para operar con manos libres. Estos pequeños micrófonos se usan fijados a la ropa de las personas. Originalmente, se sujetaban con un cordón de seguridad alrededor del cuello, pero más a menudo se colocan sobre la ropa con un clip, alfiler, cinta o imán. El cordón de solapa puede ocultarse en la ropa y conectarse a un transmisor de radiofrecuencia guardado en un bolsillo o sujetarse a una correa (para uso móvil), o puede pasar directamente al mezclador (para aplicaciones en las que permanecen en el mismo sitio).
Un micrófono inalámbrico transmite el audio como una señal de radio u óptica, en vez de a través de un cable. Por lo general, envía su señal usando un pequeño transmisor de radio FM a un receptor cercano conectado al sistema de sonido, pero también puede usar ondas infrarrojas si el transmisor y el receptor están a la vista el uno del otro.
Un micrófono de cerámica recoge las vibraciones directamente de una superficie sólida u objeto, a diferencia de las vibraciones de sonido que se transmiten por el aire. Un uso para estos dispositivos es detectar sonidos de un nivel muy bajo, como los de objetos pequeños o el de los insectos. El micrófono comúnmente consiste en un transductor magnético (bobina móvil), placa de contacto y pin de contacto. La placa de contacto se coloca directamente en la parte vibrante de un instrumento musical u otra superficie, y el pin de contacto transfiere las vibraciones a la bobina. Los micrófonos de contacto se han utilizado para captar el sonido del latido de un caracol y los pasos de las hormigas. Recientemente se ha desarrollado una versión portátil de este micrófono. Un micrófono de garganta es una variante del micrófono de contacto que capta el habla directamente de la garganta de una persona, a la que está sujeto. Esto permite que el dispositivo se use en áreas con sonidos ambientales que de otra manera harían que la voz no fuese audible.
Un micrófono parabólico utiliza un reflector parabólico para recolectar y enfocar las ondas de sonido en un receptor microfónico, de la misma manera que lo hace una antena parabólica (por ejemplo, un plato satelital) con las ondas de radio. Los usos típicos de este micrófono, que tiene una sensibilidad frontal inusualmente enfocada y puede captar sonidos desde muchos metros de distancia, incluyen grabación de naturaleza, eventos deportivos al aire libre, escuchas clandestinas, investigaciones policiales e incluso espionaje. Los micrófonos parabólicos no suelen utilizarse para aplicaciones de grabación estándar, ya que tienden a tener una baja respuesta de baja frecuencia como efecto secundario de su diseño.
Un micrófono estéreo integra dos micrófonos en una unidad para producir una señal estereofónica. Se usan a menudo para aplicaciones de radiodifusión o grabación de campo, donde sería poco práctico configurar dos micrófonos de condensador separados en una configuración X-Y clásica (véase práctica microfónica) para grabación estereofónica. Algunos de estos micrófonos tienen un ángulo de cobertura ajustable entre los dos canales.
Un micrófono cancelador de ruido es un diseño altamente direccional, ideado para entornos ruidosos. Uno de estos usos es en las cabinas de las aeronaves, donde normalmente se instalan como micrófonos de barbilla junto a los auriculares. Otro uso es en eventos musicales en directo, en escenarios de conciertos con música a elevado volumen, donde son utilizados por los vocalistas de conciertos en vivo. Muchos micrófonos con cancelación de ruido combinan las señales recibidas de dos diafragmas que están en polaridad eléctrica opuesta o se procesan electrónicamente. En los diseños de doble diafragma, el diafragma principal se monta más cerca de la fuente deseada y el segundo se ubica más lejos de la fuente para que pueda recoger los sonidos ambientales que se restarán de la señal del diafragma principal. Después de que las dos señales se hayan combinado, los sonidos que no sean la fuente deseada se reducen considerablemente, lo que aumenta sustancialmente la inteligibilidad del sonido procesado. Otros diseños de cancelación de ruido utilizan un diafragma que se ve afectado por los puertos abiertos a los lados y la parte posterior del micrófono, con una suma de 16 dB de rechazo de los sonidos que están más lejos. Vocalistas como Garth Brooks o Janet Jackson[42] han utilizado con frecuencia un diseño de auricular con cancelación de ruido de un solo diafragma. Algunos micrófonos con anulación de ruido son micrófonos de garganta.
Técnicas de micrófono estéreo
Se usan varias técnicas estándar con micrófonos utilizados en sistemas de refuerzo de sonido en actuaciones en vivo, o para grabar en un estudio de sonido o cinematográfico. Mediante la disposición adecuada de uno o más micrófonos, se pueden conservar las características deseables del sonido que se va a recoger, al tiempo que se rechazan los sonidos no deseados.
Alimentación eléctrica
Los micrófonos que contienen circuitos activos, como la mayoría de los micrófonos de condensador, requieren energía para operar los componentes activos. El primero de estos micrófonos utilizaba circuitos de tubo de vacío con una unidad de fuente de alimentación separada, empleando un cable y un conector multipolo. Con el advenimiento de la amplificación de estado sólido, los requisitos de potencia se redujeron en gran medida y se hizo práctico usar los mismos conductores de cable y conector para audio y potencia. Durante la década de 1960 se desarrollaron varios métodos de alimentación, principalmente en Europa. Los dos métodos dominantes se definieron inicialmente en alemán según los estándares DIN 45595 como Tonaderspeisung o T-potencia y DIN 45596 para la alimentación fantasma. Desde la década de 1980, la alimentación fantasma se ha vuelto mucho más común, porque la misma entrada se puede utilizar para micrófonos con y sin alimentación. En los productos electrónicos de consumo tales como cámaras réflex digitales y videocámaras, la «conexión con potencia eléctrica» es más común, para micrófonos que usan un conector de enchufe de teléfono de 3.5 mm. Las fuentes Fantasma (Phanton), T-power y plug-in power se describen en la norma internacional IEC 61938.[43]
Conectores

Los conectores más comunes utilizados por los micrófonos son:
- XLR-3 macho, en micrófonos profesionales.
- ¼ pulgada (a veces referido como 6.35 mm), un conector de audio analógico usado en los micrófonos para música más económicos, con un conector de teléfono TS asimétrico de 1/4 pulgadas (6.3 mm). Los micrófonos de armónica comúnmente usan una conexión TS de alta impedancia de 1/4 pulgadas (6.3 mm) conectados a amplificadores de guitarra.
- 3.5 mm (a veces referido como 1/8 minipulgadas), estéreo (y también viene en variedades conocidas como mono) minienchufe de teléfono en cámaras digitales, grabadoras y micrófonos de ordenador.
- Universal Serial Bus, que permite la conexión directa a los ordenadores. La electrónica en estos micrófonos alimentados a través de la conexión USB realiza preamplificación y conversión Analógico/Digital antes de que los datos de audio se transfieran a través de la conexión USB.
Algunos micrófonos usan otros conectores, como un XLR de 5 pines o un mini XLR para la conexión a equipos portátiles. Algunos micrófonos de solapa utilizan un conector patentado para conectarse a un transmisor inalámbrico, como un radio pack. Desde 2005, comenzaron a aparecer micrófonos de calidad profesional con conexiones USB, diseñados para la grabación directa para programas de ordenador.
Impedancia
Los micrófonos tienen una característica eléctrica llamada impedancia, medida en ohmios (Ω), que depende de su diseño. En micrófonos pasivos, este valor describe la resistencia eléctrica de la bobina del imán (o mecanismo similar). En los micrófonos activos, este valor describe la resistencia de salida de los circuitos del amplificador. Por lo general, se establece la «impedancia nominal».[44] La baja impedancia se considera en 600 Ω. La impedancia media se considera entre 600 Ω y 10 kΩ. La alta impedancia es superior a 10 kΩ. Debido a su amplificador electrónico incorporado, los micrófonos de condensador típicamente tienen una impedancia de salida entre 50 y 200 Ω.[45]
La salida de un micrófono dado entrega la misma potencia ya sea de baja o alta impedancia.[cita requerida] Si un micrófono se fábrica en versiones de alta y baja impedancia, la versión de alta impedancia tiene un voltaje de salida más alto para una entrada de presión de sonido dada, y es adecuado para usar con amplificadores de guitarra de tubo de vacío, por ejemplo, que tienen una impedancia de entrada alta y requieren un voltaje de entrada de señal relativamente alto para superar el ruido inherente de los tubos. La mayoría de los micrófonos profesionales son de baja impedancia, alrededor de 200 Ω o menos. El equipo de sonido profesional de tubo de vacío incorpora un transformador que aumenta la impedancia del circuito del micrófono a la alta impedancia y al voltaje necesario para activar el tubo de entrada. También hay disponibles transformadores de adaptación externos que se pueden usar en línea entre un micrófono de baja impedancia y una entrada de alta impedancia.
Los micrófonos de baja impedancia son preferibles a los de alta impedancia por dos razones: una es que usar un micrófono de alta impedancia con un cable largo produce una pérdida de señal de alta frecuencia debido a la capacitancia del cable, que forma un filtro de paso bajo con la impedancia de salida del micrófono.[cita requerida] El otro es que los cables largos de alta impedancia tienden a captar más señales parásitas en forma de interferencias electromagnéticas. No se producen daños si la impedancia entre el micrófono y otros equipos no coincide; lo peor que puede ocurrir es una reducción en la señal o un cambio en la respuesta de frecuencia.
Algunos micrófonos están diseñados para que su impedancia no coincida con la carga a la que están conectados.[46] En este caso, puede alterarse su respuesta de frecuencia y causar distorsión, especialmente a niveles altos de presión sonora. Ciertos micrófonos de cinta y dinámicos son las excepciones a este comportamiento, debido a que los diseñadores presuponen que cierta impedancia de carga forma parte del circuito interno de amortiguación electroacústica del micrófono.[47]
Interfaces de micrófonos digitales

El estándar AES42, publicado por la Audio Engineering Society, define una interfaz digital para micrófonos. Los micrófonos que cumplen con este estándar emiten directamente un flujo de audio digital a través de un conector macho XLR o XLD, en lugar de producir una salida analógica. Los micrófonos digitales se pueden usar con equipos nuevos con conexiones de entrada apropiadas que cumplan con el estándar AES42, o bien a través de un dispositivo de interfaz adecuado. Los micrófonos con calidad de estudio que operan de acuerdo con el estándar AES42 están disponibles en las gamas de varios fabricantes.
Mediciones y especificaciones

Debido a las diferencias en su construcción, los micrófonos tienen sus propias respuestas características al sonido. Estas diferencias producen distintas respuesta para fases y frecuencias no uniformes. Además, los micrófonos no son uniformemente sensibles a la presión del sonido, y pueden aceptar diferentes niveles sin distorsión. Aunque para aplicaciones científicas son deseables micrófonos con una respuesta lo más uniforme posible, este no suele ser el caso para la grabación de música, ya que la respuesta no uniforme de un micrófono puede producir una coloración deseable del sonido. Existe un estándar internacional para especificaciones de micrófonos,[44] pero pocos fabricantes se adhieren a él. Como resultado, la comparación de los datos publicados de diferentes fabricantes es difícil, porque se usan distintas técnicas de medición. El sitio web Microphone Data ha recopilado las especificaciones técnicas completas con imágenes, curvas de respuesta y datos técnicos de los fabricantes de micrófonos para cada micrófono actualmente listado, e incluso algunos modelos obsoletos, y muestra los datos para todos en un formato común para facilitar la comparación.[48] Sin embargo, se debe tener cuidado al sacar conclusiones de este u otros datos publicados, a menos que se sepa que el fabricante ha suministrado las especificaciones de acuerdo con la norma IEC 60268-4.
Un diagrama de respuesta en frecuencia muestra la sensibilidad del micrófono en decibelios en un rango de frecuencias (típicamente de 20 hercios a 20 kilohercios), generalmente para un sonido perfectamente alineado con el eje del micrófono (sonido que llega a 0° a la cápsula). La respuesta de frecuencia puede ser de forma orientativa como la siguiente: "30 Hz-16 kHz ± 3 dB". Esto se interpreta como un gráfico casi plano, lineal, entre las frecuencias establecidas, con variaciones en la amplitud no supriores ni inferiores en 3 dB. Sin embargo, no se puede determinar a partir de esta información lo suaves que son las variaciones, ni en qué partes del espectro se producen. Téngase en cuenta que valores declarados comúnmente como "20 Hz-20 kHz" no tienen sentido sin una medida de la tolerancia en decibelios. La respuesta de frecuencia de los micrófonos direccionales varía mucho con la distancia desde la fuente de sonido y con la geometría de la fuente de sonido. IEC 60268-4 específica que la respuesta de frecuencia se debe medir en condiciones de «onda progresiva plana» (muy lejos de la fuente), pero esto rara vez es práctico. Los micrófonos para «hablar de cerca» se pueden medir con diferentes fuentes de sonido y distancias, pero no existe un estándar y, por lo tanto, no hay forma de comparar datos de diferentes modelos a menos que se describa la técnica de medición.
El ruido propio, o el nivel de ruido de entrada equivalente, es el nivel de sonido que crea la misma tensión de salida del micrófono en ausencia de sonido. Esto representa el punto más bajo del rango dinámico del micrófono, y es particularmente importante si se desea grabar sonidos que son muy débiles. La medida a menudo se establece en dB(A), que es el volumen equivalente del ruido en una escala de decibelios ponderada en frecuencia de cómo escucha el oído, por ejemplo: "15 dBA SPL" (SPL significa nivel de presión sonora relativo a 20 pascales). Cuanto menor sea el número, mejor. Algunos fabricantes de micrófonos indican el nivel de ruido con el estándar ITU-R 468 ruido ponderado, que representa con mayor precisión la forma en que percibe el ruido el oído humano, pero da una cifra de 11-14 dB más alta. Un micrófono silencioso generalmente proporciona 20 dBA SPL o 32 dB SPL 468 ponderado. Los micrófonos muy silenciosos han existido durante años para aplicaciones especiales, como el Brüel & Kjaer 4179, con un nivel de ruido de 0 dB SPL. Recientemente, se han introducido algunos micrófonos con especificaciones de bajo nivel de ruido en el mercado de estudio / entretenimiento, como los modelos de Neumann y Røde que anuncian niveles de ruido de entre 5-7 dBA. Generalmente, esto se logra alterando la respuesta de frecuencia de la cápsula y la electrónica para producir menos ruido dentro de la curva A-ponderada, mientras que el ruido de banda ancha puede aumentar.
El SPL máximo que el micrófono puede aceptar se mide para valores particulares de distorsión armónica (THD), típicamente del 0,5 %. Esta cantidad de distorsión es generalmente inaudible, por lo que se puede usar el micrófono de forma segura en este SPL sin dañar la grabación. Ejemplo: "142 Pico de presión sonora (a 0,5 % THD)". Cuanto mayor sea el valor, mejor, aunque los micrófonos con un SPL máximo muy alto también tienen un mayor ruido propio.
El nivel de corte es un indicador importante del nivel máximo utilizable, ya que la cifra de 1 % THD generalmente citada bajo SPL máximo es realmente un nivel muy leve de distorsión, bastante inaudible, especialmente en picos altos breves. El corte es mucho más audible. Para algunos micrófonos, el nivel de corte puede ser mucho mayor que el SPL máximo.
El rango dinámico de un micrófono es la diferencia en SPL entre el suelo de ruido y el SPL máximo. Si se establece por sí mismo, por ejemplo, "120 dB", transmite significativamente menos información que el ruido propio y las cifras SPL máximas individualmente.
La sensibilidad indica con qué eficacia el micrófono convierte la presión acústica en voltaje de salida. Un micrófono de alta sensibilidad crea más voltaje y, por lo tanto, necesita menos amplificación en el mezclador o en el dispositivo de grabación. Esta es una preocupación práctica pero no es directamente una indicación de la calidad de un micrófono, y de hecho el vocablo sensibilidad es un nombre inapropiado, ganancia de transducción es quizás más significativo (o simplemente "nivel de salida") porque la sensibilidad real es generalmente establecida por el ruido base, y demasiada "sensibilidad" en términos de nivel de salida compromete el nivel de corte. Hay dos medidas comunes. El estándar internacional (preferido) se fábrica en milivoltios por pascal a 1 kHz. Un valor más alto indica una mayor sensibilidad. El método americano más antiguo se refiere a un estándar de 1 V/Pa y se mide en decibelios simples, lo que se traduce en un valor negativo. De nuevo, un valor más alto indica una mayor sensibilidad, por lo que -60 dB es más sensible que -70 dB.
Micrófonos de medición

Algunos micrófonos están diseñados para probar altavoces, medir niveles de ruido y cuantificar una experiencia acústica. Estos son transductores calibrados y generalmente se suministran con un certificado de calibración que establece la sensibilidad absoluta contra la frecuencia. La calidad de los micrófonos de medición a menudo se refiere a las designaciones "Clase 1", "Tipo 2", etc., que son referencias no a especificaciones de micrófono sino a sonómetros.[49] Se adoptó un estándar más amplio[50] para la descripción del rendimiento de los micrófonos de medición.
Los micrófonos de medición generalmente son sensores escalares de presión; exhiben una respuesta omnidireccional, limitada solo por el perfil de dispersión de sus dimensiones físicas. Las mediciones de intensidad de sonido o potencia de sonido requieren mediciones de gradiente de presión, que normalmente se realizan con matrices de al menos dos micrófonos, o con anemómetros.
Calibración
Para realizar una medición científica con un micrófono, se debe conocer su sensibilidad precisa (en voltios por cada pascal). Dado que esto puede cambiar en la vida útil del dispositivo, es necesario utilizar micrófonos de medición calibrados con regularidad. Este servicio lo ofrecen algunos fabricantes de micrófonos y laboratorios de pruebas independientes certificados. Todo micrófono de medición calibrado es en última instancia trazable según un patrón primario en un instituto nacional de medición, como el NPL en el Reino Unido, el PTB en Alemania y el Instituto Nacional de Estándares y Tecnología en los Estados Unidos, que más comúnmente calibran utilizando un estándar primario de reciprocidad. Los micrófonos de medición calibrados con este método se pueden usar para calibrar otros micrófonos utilizando técnicas de comparación de calibración.
Dependiendo de la aplicación a la que se destinen, los micrófonos de medición se deben probar periódicamente (cada año o varios meses generalmente) y después de cualquier evento potencialmente dañino, como caídas (la mayoría de estos micrófonos vienen en estuches acolchados con espuma para reducir este riesgo) o la exposición a sonidos más allá del nivel aceptable.
Matrices de micrófonos
Una matriz de micrófonos es cualquier grupo de micrófonos que funcionan en tándem. Poseen muchas aplicaciones:
- Sistemas para separar fuentes de voz y el ruido ambiental (especialmente teléfonos, sistemas de reconocimiento del habla o audífonos).
- Sonido envolvente y tecnologías relacionadas.
- Localización de objetos por sonido, como por ejemplo su uso militar para localizar la procedencia del fuego de artillería, o la localización y seguimiento de aeronaves.
- Grabaciones originales de alta fidelidad.
- Conformación de haces de sonido para la detección acústica localizada de tejidos subcutáneos.
Normalmente, una matriz se compone de micrófonos omnidireccionales distribuidos sobre el perímetro de un espacio. Están conectados a un ordenador que registra e interpreta los resultados en una forma coherente.
Protección antiviento y antiestallido acústico


Los protectores antiviento o antiestallido acústico proporcionan un método para reducir el efecto del viento en los micrófonos. Mientras que las pantallas deflectoras brindan protección contra microexplosiones sonoras unidireccionales, los antiviento de gomaespuma protegen del viento la rejilla desde todas las direcciones. Otros sistemas envuelven por completo el micrófono y protegen también su cuerpo. Esto último es importante porque, dado el contenido de baja frecuencia extrema del ruido del viento, la vibración inducida en la carcasa del micrófono puede contribuir sustancialmente a la formación de ruido.
El material de protección utilizado —tela metálica, tela o espuma— está diseñado para tener una impedancia acústica significativa. Las relativamente bajas variaciones de presión del aire de partículas de baja velocidad que constituyen las ondas de sonido pueden atravesar la pantalla con una mínima amortiguación, pero el aire de partículas de alta velocidad es impedido en mayor medida. Aumentar el grosor del material mejora la amortiguación del viento pero también comienza a comprometer el sonido de alta frecuencia. Esto limita el tamaño práctico de pantallas de gomaespuma simples. Mientras que las espumas y las mallas de alambre pueden ser parcial o totalmente autoportantes, las telas suaves y las mallas de tejido requieren permanecer tensadas sobre un bastidor o ser sujetadas con elementos estructurales más gruesos.
Dado que todo el ruido por viento se genera en la primera superficie en que golpea el aire, cuanto mayor sea el espacio entre la periferia del antiviento o pantalla y la cápsula del micrófono, mayor será la atenuación del ruido. Para un antiviento aproximadamente esférico, la amortiguación aumenta aproximadamente el cubo de esa distancia. Por lo tanto, los antiviento más grandes son siempre mucho más eficientes que los más pequeños.[51] Con los protectores antiviento de canastilla completa hay un efecto de cámara de presión adicional, explicado por primera vez por Joerg Wuttke,[52] que, para micrófonos de dos puertos (gradiente de presión), permite que la combinación antiviento/micrófono actúe como un filtro acústico de paso alto.

Dado que la turbulencia sobre una superficie es la fuente del ruido del viento, reducir la turbulencia bruta puede aumentar la reducción del ruido. Las superficies lisas aerodinámicamente, y las que evitan que se generen poderosos vórtices, ambas suelen usarse con éxito. Históricamente, el pelaje o pelo artificial ha demostrado ser muy útil para este fin, ya que sus fibras producen microturbulencias y absorben energía en silencio. Si no están protegidos para resistir el viento y la lluvia, las fibras de pelaje o pelo son muy transparentes acústicamente, pero el respaldo de un tejido puede proporcionar una amortiguación significativa. Como material, es difícil de fabricar con consistencia y de mantener en perfectas condiciones. Es por ello que tiende a evitarse su uso (DPA 5100, Rycote Cyclone).[54]
En el estudio y en el plató, las pantallas deflectoras y los protectores antiviento de espuma pueden ser útiles por razones de higiene y para proteger los micrófonos de la saliva y el sudor. También, con sus colores y personalización pueden ser útiles como identificadores. En su lugar, el protector de canastilla puede contener un sistema de suspensión para aislar al micrófono del ruido producido por los golpes recibidos durante su manejo.
Establecer la eficiencia de la reducción del ruido generado por el viento es una ciencia inexacta, ya que el efecto varía enormemente con la frecuencia y, por lo tanto, con el ancho de banda del micrófono y el canal de audio. A frecuencias muy bajas (10-100 Hz), donde existe una energía por viento masiva, las reducciones son importantes para evitar la sobrecarga de la cadena de audio, particularmente en las primeras fases. Esto puede producir el típico sonido “wump” asociado con el viento, que a menudo es silenciado debido a la limitación del pico de baja frecuencia. A frecuencias más altas - 200 Hz a ~ 3 kHz - la curva de sensibilidad auditiva permite escuchar el efecto del viento como una adición al sonido ambiente, a pesar de que tiene un contenido de energía mucho más bajo. Los antiviento simples pueden permitir que el ruido producido por el viento se reduzca en 10 dB; los mejores pueden lograr una atenuación de más de 50 dB. Sin embargo, también debería indicarse la transparencia acústica, particularmente a alta frecuencia, ya que un nivel muy alto de atenuación del viento podría asociarse con un sonido ensordecido o débil.
Clasificación de los micrófonos
Los micrófonos se pueden dividir según varias clasificaciones:
- Según su directividad
- Según el transductor
- Según su utilidad
- Según su calidad
Según la directividad

Como se mencionó en las características hay seis tipos de micrófonos:
- Micrófono omnidireccional
- Micrófono de zona de presión
- Micrófono bidireccional
- Micrófono de gradiente de presión
- Micrófono unidireccional de interferencia, línea, rifle, cañón o semicañón.
- Micrófono parabólico
Según el confinamiento del diafragma
Se establecen tres grupos:
- Micrófono de presión
- Micrófono de gradiente de presión o velocidad
- Micrófono combinado de presión y gradiente de presión
Según su transducción mecánico-eléctrica
Los 6 tipos de micrófonos más importantes son:
- Micrófono electrostático: de condensador, electret, etc.
- Micrófono dinámico: de bobina y de cinta
- Micrófono piezoeléctrico
- Micrófono magnetoestrictivo
- Micrófono magnético
- Micrófono de carbón
Según su utilidad

Existen seis tipos de micrófonos según su uso:
- Micrófono de mano o de bastón: Diseñado para utilizarse sujeto con la mano. Está diseñado de forma que amortigua los golpes y ruidos de manipulación.
- Micrófono de estudio: No poseen protección contra la manipulación, pero se sitúan en una posición fija y se protegen mediante gomas contra las vibraciones.
- Micrófono de contacto: Toman el sonido al estar en contacto físico con el instrumento. Se utiliza también para disparar un sonido de un módulo o sampler a través de un MIDI trigger.
- Micrófono de solapa, de corbata o Lavalier. Micrófono en miniatura que posee filtros para evitar las bajas frecuencias que produce el roce del dispositivo con la ropa.
- Micrófono inalámbrico: La particularidad de este dispositivo es la posibilidad de utilizarlo sin cable. Pueden ser de solapa o de bastón (de mano). No necesitan el cable al poseer un transmisor de FM (más habitual que uno de AM).
- Micrófono mega direccional: Micrófono con una zona de grabación de 50 cm. Sirve para grabar a una sola persona o fuente desde distancias mayores.
Véase también
- Alimentación phantom
- Alimentación A-B
- Caja DI
- Grabación estéreo
- Línea no balanceada de audio
- Línea balanceada de audio
- Megáfono
- Micrófono estéreo
- Micrófono láser
- PC 99
- Sistemas de alimentación de micrófonos
- Tarjeta de sonido
- Geófono, sensor de ondas sonoras transmitidas por el terreno.
- Hidrófono, sensor de ondas sonoras transmitidas por el agua.
- Arco cantante, un micrófono basado en un arco de plasma.
- Práctica microfónica, con ejemplos de uso.
- Impedancia nominal
- Montaje flotante, soporte que suspende el micrófono mediante correas elásticas.
- Micrófonos generales
Notas
Referencias
- ↑ «micro». RAE.
- ↑ Gabriel Rodríguez Alberich. «Micrófono». DIRAE. Consultado el 4 de diciembre de 2019. «Primera aparición en un diccionario: 1787, Diccionario castellano con las voces de ciencias s y artes y sus correspondientes en las tres lenguas francesa, latina e italiana (Esteban de Terreros y Pando)».
- ↑ «Aplicaciones móviles que usan micrófono sin que lo sepas». 18 de abril de 2011. Consultado el 1 de julio de 2015.
- ↑ Durkel, Jim (1 de septiembre de 2010). «Dispositivos de Ayuda Auditiva». Archivado desde el original el 19 de septiembre de 2018. Consultado el 2 de julio de 2015.
- ↑ Montgomery, Henry 1959 Amplification and High Fidelity in the Greek Theater. The Classic Journal
- ↑ McVeigh, Daniel P 2000. An Early History of the Telephone: 1664–1866: Robert Hooke's Acoustic Experiments and Acoustic Inventions
- ↑ MacLeod, Elizabeth (1999). Alexander Graham Bell: an inventive life. Kids Can Press, Toronto.
- ↑ Paul J. Nahin (2002). Oliver Heaviside: The Life, Work, and Times of an Electrical Genius of the Victorian Age. JHU Press. p. 67.
- ↑ Bob Estreich. «David Edward Hughes». Archivado desde el original el 1 de noviembre de 2019. Consultado el 3 de julio de 2015.
- ↑ a b Huurdeman, Anton (2003). The Worldwide History of Telecommunications. John Wiley & Sons.
- ↑ «David Hughes». Consultado el 17 de diciembre de 2012.
- ↑ «¿Cuál es el origen del Micrófono?». 15 de noviembre de 2011. Consultado el 11 de julio de 2015.
- ↑ «Patent US474230» (en inglés). United States Patent Office. Consultado el 7 de marzo de 2016.
- ↑ a b «A brief history of microphones». Archivado desde el original el 24 de enero de 2013. Consultado el 17 de diciembre de 2012.
- ↑ «David Edward Hughes: Concertinist and Inventor». Archivado desde el original el 13 de septiembre de 2016. Consultado el 17 de diciembre de 2012.
- ↑ Television International magazine article – Lee De Forest – (1873–1961). Retrieved 12-04-2013
- ↑ Epand, Victor (23 de julio de 2015). «History, Growth and Development Of Modern Microphones» (en inglés). Consultado el 24 de julio de 2015.
- ↑ Fagen, M. D. A History of Engineering and Science in the Bell System: The Early Years (1875–1925). New York: Bell Telephone Laboratories, 1975
- ↑ Hennessy, Brian 2005 The Emergence of Broadcasting in Britain Devon Southerleigh
- ↑ Robjohns, Hugh 2001 A Brief History of Microphones. Microphone Data Book
- ↑ «1931 Harry F. Olson and Les Anderson, RCA Model 44 Ribbon Microphone». Mix Magazine. 1 de septiembre de 2006. Archivado desde el original el 24 de marzo de 2008. Consultado el 10 de abril de 2013.
- ↑ «Milab Microphones DM-1001» [Milab DM-1001 Información Técnica] (en inglés). Milab DM-1001. Consultado el 14 de julio de 2016.
- ↑ «Bell Laboratories and The Development of Electrical Recording». Stokowski.org (Leopold Stokowski site). Archivado desde el original el 17 de enero de 2013. Consultado el 2 de agosto de 2015.
- ↑ Seung S. Lee, Woon Seob Lee (14 de febrero de 2008). «Piezoelectric microphone built on circular diaphragm». ScienceDirect. Sensors and Actuators A 144 (2008) 367–373 (Department of Mechanical Engineering, Korea Advanced Institute of Science and Technology, 373-1 Guseong-dong, Yuseong-gu, Daejeon, Republic of Korea). Archivado desde el original el 17 de julio de 2013. Consultado el 3 de marzo de 2017.
- ↑ Paritsky, Alexander; Kots, A. (1997). «Fiber optic microphone as a realization of fiber optic positioning sensors». Proc. of International Society for Optical Engineering (SPIE) 3110: 408-409. doi:10.1117/12.281371.
- ↑ Alexander Paritsky and Alexander Kots (8 de octubre de 2002). «Small optical microphone/sensor». Patente (6462808).
- ↑ Karlin, Susan. «Case Study: Can You Hear Me Now?». rt-image.com. Valley Forge Publishing. Archivado desde el original el 15 de julio de 2011.
- ↑ Goulde, Berg. «Microphones For Computer». Microphone top gear. Consultado el 3 de marzo de 2017.
- ↑ «Cirrus Logic Completes Acquisition of Wolfson Microelectronics». MarketWatch.com. Consultado el 21 de agosto de 2014.
- ↑ «Analog Devices To Sell Microphone Product Line To InvenSense». MarketWatch.com. Archivado desde el original el 16 de julio de 2017. Consultado el 27 de noviembre de 2015.
- ↑ «Knowles Completes Acquisition of NXP’s Sound Solutions Business». Knowles. Consultado el 5 de julio de 2011.
- ↑ «MEMS Microphone Will Be Hurt by Downturn in Smartphone Market». Seeking Alpha. Consultado el 23 de agosto de 2009.
- ↑ «OMRON to Launch Mass-production and Supply of MEMS Acoustic Sensor Chip -World's first MEMS sensor capable of detecting the lower limit of human audible frequencies-». Consultado el 24 de noviembre de 2009.
- ↑ «MEMS Mics Taking Over». EETimes.
- ↑ Bartlett, Bruce. «How A Cardioid Microphone Works». Archivado desde el original el 12 de diciembre de 2016. Consultado el 11 de febrero de 2018.
- ↑ History & Development of Microphone. Archivado el 4 de julio de 2008 en Wayback Machine. Lloyd Microphone Classics.
- ↑ Proximity Effect. Archivado el 9 de noviembre de 2007 en Wayback Machine. Geoff Martin, Introduction to Sound Recording.
- ↑ «History – The evolution of an audio revolution». Shure. Consultado el 30 de julio de 2013.
- ↑ Dave Berners (December 2005). «Ask the Doctors: The Physics of Mid-Side (MS) Miking». Universal Audio WebZine. Universal Audio. Consultado el 30 de julio de 2013.
- ↑ «Directional Patterns of Microphones». Consultado el 30 de julio de 2013.
- ↑ («US4361736». Patente.)
- ↑ «Copia archivada». Archivado desde el original el 10 de mayo de 2012. Consultado el 13 de enero de 2009.
- ↑ «Multimedia systems - Guide to the recommended characteristics of analogue interfaces to achieve interoperability». Webstore.iec.ch (en inglés). IEC 61938:2013. Consultado el 3 de marzo de 2017.
- ↑ a b International Standard IEC 60268-4
- ↑ Eargle, John; Chris Foreman (2002). Audio Engineering for Sound Reinforcement. Milwaukee: Hal Leonard Corporation. p. 66. ISBN 0-634-04355-2.
- ↑ «Copia archivada». Archivado desde el original el 28 de abril de 2010. Consultado el 6 de febrero de 2009.
- ↑ Robertson, A. E.: "Microphones" Illiffe Press for BBC, 1951–1963
- ↑ «Microphone Data». Archivado desde el original el 10 de febrero de 2007. Consultado el 12 de febrero de 2007.
- ↑ IEC Standard 61672 and ANSI S1.4
- ↑ IEC 61094
- ↑ Woolf Mibs, Chris (Sept./Oct. 2005). «Blasted Microphones». Line up IPS UK. Archivado desde el original el 18 de diciembre de 2016.
- ↑ «Microphones and Wind». www.filmebase.pt. Consultado el 29 de octubre de 2017.
- ↑ «Thomann Consejero-Online Accesorios de micrófono Antipop, antiviento ¿Qué es qué?». Musikhaus Thomann. Consultado el 29 de octubre de 2017.
- ↑ «Cyclone | Rycote». rycote.com (en inglés estadounidense). Consultado el 29 de octubre de 2017.
Enlaces externos
- Información sobre tipo de micrófonos.
 Wikimedia Commons alberga una categoría multimedia sobre el micrófono.
Wikimedia Commons alberga una categoría multimedia sobre el micrófono.
| Control de autoridades |
|
|---|
 Datos: Q46384
Datos: Q46384- Multimedia: Microphones / Q46384